
Te enseño a usar agentes de IA como Codex y Claude Code
Esta es tu oportunidad para aprender sobre Agentes de IA, un curso en el que aprender a usar Codex y Claude Code para luego aplicarlo a la robótica.

¿Va a convertirse Integrarobot en una newsletter de IA? No, pero desde que vengo usando Codex de manera intensiva me he dado cuenta de que va a convertirse en la bisagra necesaria para que la robótica despegue.
Ya hace tiempo que escribí aquí sobre Agentes de IA, pero entonces lo veía como ejemplo a seguir para el desarrollo de los VLA, por la necesidad de disponer de una IA que no sólo sea capaz de reconocer imagen y texto (o generarlo) sino también de pasar a la acción.
Pero ahora el enfoque es diferente, porque no es necesario que los Agentes de IA ocupen el cerebro del robot, para eso se están desarrollando modelos específicos, como los WAM, sino que de lo que se trata es de usarlos para el desarrollo de los robots.
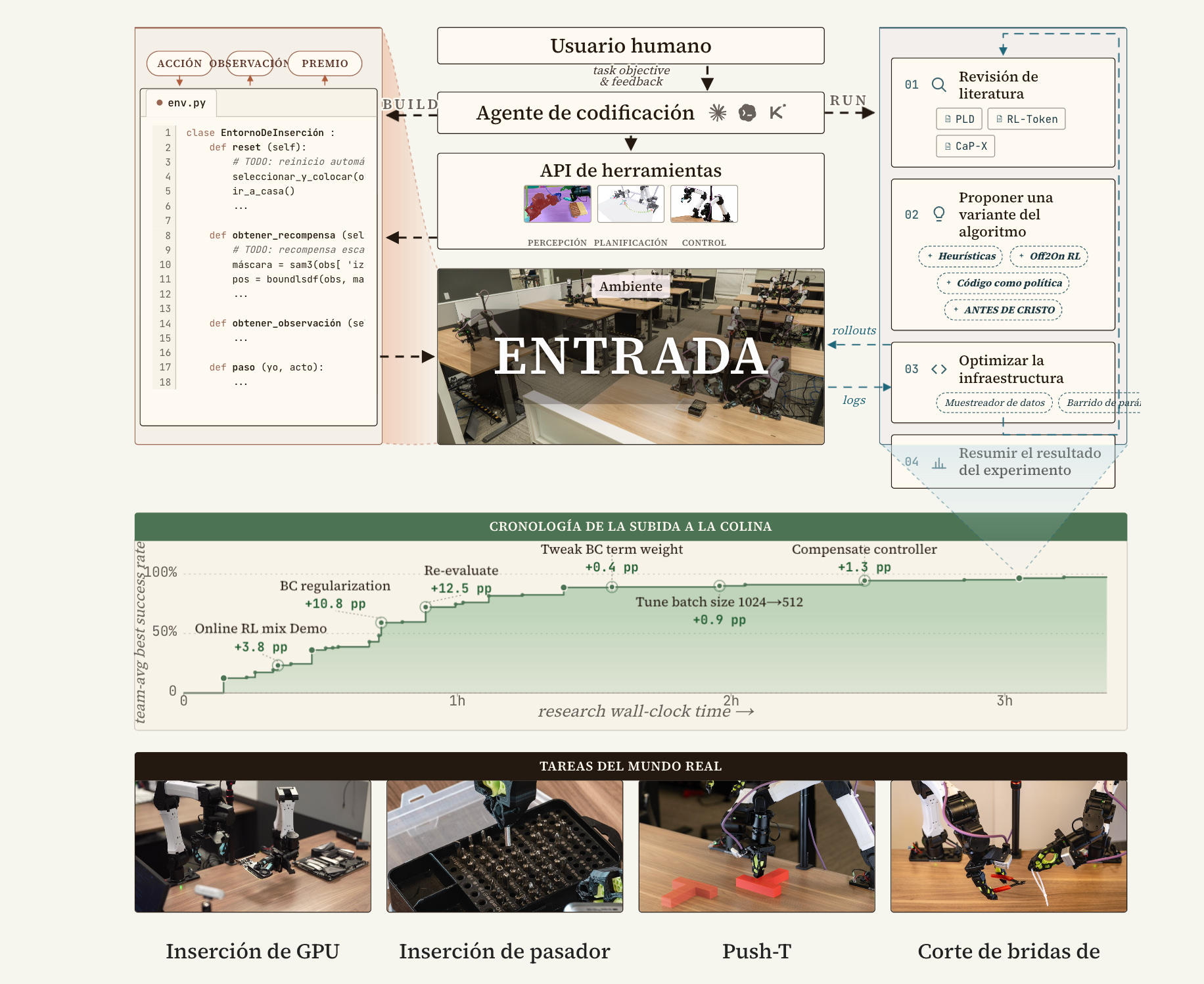
La gente de NVIDIA nos acaba de dejar un ejemplo de esto que comento, para que sepas a qué me refiero. Se trata del proyecto ENPIRE, donde se ha dejado a 8 agentes Codex al frente de una flota de robots, con el objetivo simple de resolver una tarea lo más rápido posible, mantener a los robots ocupados pero seguros y no desperdiciar cómputo valioso.
El resultado es que ahora los agentes de IA como Codex, Claude Code y Kimi Code, pueden usarse para realizar pruebas de robots 24/7 y de esta forma mejorar significativamente el avance en el desarrollo de software y entrenamiento de robots, sin tener que esperar a que un ingeniero esté disponible para hacer estas pruebas.
Y lo que quiero contarte hoy aquí es que ENPIRE es sólo la punta del iceberg, porque voy a darte la respuesta a una pregunta muy habitual: ¿Cómo es posible que no paren de salir nuevos robots humanoides casi cada día? Por ejemplo ayer se presentó ENO de Genesis, que hasta ahora se había dedicado a hacer software de IA para robots. Así que la razón está clara, es el uso que los desarrolladores están haciendo de la IA para crear robots.
Así que esto es lo que quiero enseñarte en el curso que ya he empezado a grabar y del que hay disponible una primera clase: cómo crear tu segundo cerebro digital sobre robótica, usando la técnica del LLM Wiki de Andrej Karpathy y el Open Knowledge Format que acaba de presentar Google.
Comenzamos por crear el segundo cerebro porque la IA necesita contexto para poder realizar su trabajo, por lo tanto lo primero que hacemos en Codex o Claude Code es alimentarlo con nuestro conocimiento sobre robótica, o con el conocimiento disponible en esta newsletter, en la base de datos de robots humanoides, … para luego ponerlo a trabajar.
Lo que viene después es lo más emocionante ya que no hay límite y podemos ir avanzando a medida que progresa también el desarrollo de la propia robótica.
Si empezamos de cero lo primero será aprender a crear skills, por ejemplo para evaluar investigaciones sobre robótica que podamos aplicar luego en nuestros proyectos. Cada día aparecen nuevas publicaciones de este tipo pero es difícil saber si pueden tener una utilidad real para nosotros. Cuando la IA nos conoce puede decirnos si algo nuevo puede tener una utilidad para nuestro trabajo o no vale la pena detenerse en ello.
Una vez que tenemos creadas skills, que son una forma de estandarizar un proceso de trabajo, como si fuera un prompt muy elaborado y que siempre ha de realizarse de la misma manera, se puede pasar a crear automatizaciones, que es la forma de que algo que ya está estandarizado se ejecute de manera recurrente a lo largo del tiempo. Esto por ejemplo lo podremos usar para estar al día de las novedades relativas al software o hardware que estemos usando con los robots.
A partir de aquí se pone más emocionante, porque ya se pueden empezar a construir cosas, al principio virtuales, pero luego podremos pasar a lo físico haciendo que los agentes de IA puedan controlar un robot real. Y en esa interfase nos encontramos con los simuladores, algo que hasta la aparición de los agentes podría resultar difícil de manejar, por su complejidad técnica, pero que ahora con los Agentes es pan comido.
En el curso iremos aprendiendo todo lo nuevo que vaya saliendo sobre Agentes para aplicarlo a la robótica (o a lo que cada uno quiera) porque no paran de salir novedades. Por ejemplo aprenderemos a crear aplicaciones de software para el control de robots y también algo de lo que ahora se habla mucho: cómo generar bucles para que los agentes trabajen de manera autónoma, justo lo que han hecho en NVIDIA con ENPIRE.
El objetivo final de este nuevo curso de Integrarobot es que puedas llegar a usar los Agentes de IA para alimentar con datos de entrenamiento a los robots. Hay mucho que aprender para llegar a eso y por eso creo que es el mejor momento de ponerse manos a la obra.
Así que me encantaría compartir contigo todo esto que estoy descubriendo sobre Agentes de IA y cómo aplicarlos a la robótica, por eso te animo a unirte a la Comunidad Pioneros Robots y de esta forma tener acceso exclusivo a los contenidos del curso.
Más noticias sobre IA Física y robótica
💰 Theker cierra una Serie A de 85 millones de dólares, presentada como una de las mayores rondas europeas de robótica, con CRV liderando y participación de Samsung, LVMH, Inditex, Henkel Ventures y Cathay Innovation. La startup barcelonesa trabaja en robots industriales con capacidades de IA para entornos no estructurados como retail, residuos, alimentación y logística. Una señal de que en se Europa empieza a financiar robótica cuando hay clientes, variabilidad real y ROI medible.
🤖 NEURA Robotics anuncia una Serie C de hasta 1.400 millones de dólares para escalar producción, expandirse globalmente y acelerar su plataforma Neuraverse. La compañía quiere llevar su humanoide 4NE1 y sus robots cognitivos a clientes industriales junto a socios como Bosch, Schaeffler, NVIDIA, Qualcomm y Amazon. Más que una ronda, es una apuesta por convertir cada despliegue en una fuente de datos para mejorar los robots.
👁️ OpenCV lanza su versión 5.0, una actualización mayor de la librería de visión por computador con nuevo motor DNN, mejor soporte ONNX, cambios profundos en módulos 3D y limpieza de APIs antiguas. Para robótica OpenCV sigue siendo una pieza básica de percepción, inspección, cámaras, calibración y pipelines visuales.
🖐️ Chris Paxton explica por qué las manos robóticas están mejorando rápido, pero siguen siendo un cuello de botella importante: coste, robustez, sensores táctiles, fuerza y diseño mecánico. El artículo compara opciones abiertas como CRAFT, RUKA o LEAP con manos comerciales más caras, y señala que ya hay diseños con especificaciones cercanas a la mano humana. Para los humanoides, la mano deja de ser un accesorio y se convierte en una pieza crítica de manipulación.
🌐 Unitree aparece junto a BYD, Alibaba, Baidu y otras empresas chinas en la lista 1260H del Pentágono, que identifica compañías consideradas vinculadas al ecosistema militar chino. La medida no equivale a una sanción directa, pero limita contratos del Departamento de Defensa y anticipa restricciones indirectas desde 2027. La robótica humanoide entra así de lleno en la geopolítica industrial.
🧰 Rotaku abre reservas de Domo, una plataforma humanoide para desarrolladores que parte de 2.999 dólares y ofrece versiones con SDK, URDF, simulación, teleoperación, entrenamiento de políticas y opciones de manos. No se presenta como robot terminado para despliegue, sino como hardware para experimentar con IA encarnada. La señal es clara: baja el precio de entrada para probar humanoides fuera de grandes laboratorios.
🛠️ Alfred es una startup de IA física respaldada por Sam Altman, Khosla Ventures y SV Angel que busca acelerar el desarrollo de software para robots y vehículos. Según la información disponible, fue fundada por ex empleados de Tesla y Meta, trabaja desde Hawthorne y estaría levantando capital con una valoración de 40 millones de dólares.
🪜 LadderMan presenta un sistema para que humanoides suban escaleras de mano y manipulen objetos mientras están apoyados en ellas, combinando aprendizaje por imitación, refuerzo, percepción de profundidad y transferencia sim-to-real. El trabajo, con autores de Amazon FAR, Berkeley, Stanford, CMU y USC, muestra tareas como ajustar un cuadro, entregar una caja o apretar una bombilla.
🪑 Unitree participa con BitRobot Network, Lightwheel AI y Singapore Institute of Technology en el Humanoid IKEA Assembly Challenge para IROS 2026. El reto consiste en evaluar si humanoides pueden montar muebles tipo IKEA, una tarea menos vistosa que un salto mortal pero mucho más útil para medir percepción, planificación, fuerza, manos y recuperación de errores. Es el tipo de benchmark que acerca la robótica a tareas de loco-manipulación real.
🧬 Humanoid Anatomy publica un mapa visual de la cadena de valor de los humanoides, separando segmentos de hardware e inteligencia, proveedores, compañías cotizadas y exposición pública al sector. Esta nueva web ayuda a entender dónde está el valor entre actuadores, sensores, compute, baterías, software, plataformas y fabricantes. Para seguir el mercado, la anatomía del humanoide empieza a ser tan importante como el robot final.
📚 Introduction to Autonomous Robots es un documento abierto en GitHub que contiene un libro y materiales educativos sobre robots autónomos, con más de 3.000 estrellas y repositorios asociados para web y laboratorios. Se trata de un recurso útil para formar criterio técnico sobre percepción, control, navegación y autonomía.
🏠 Tuya se alía con Zeroth para integrar robots domésticos con sensores, memoria y dispositivos del hogar conectado. Tuya aporta su plataforma AI+IoT, Physical AI Engine y OmniMem, mientras Zeroth aporta robots de consumo como M1. El objetivo es que el robot doméstico no dependa solo de sus cámaras: necesitará contexto de la casa, rutinas, presencia y memoria para actuar con sentido.