
Lo que la nueva mano de Optimus puede enseñarnos 🖐️
¿Logrará Tesla un hito para la manipulación similar al alcanzado por Honor para la locomoción?

“El que no corre, vuela” puede ser una buena forma de representar lo que está ocurriendo con la tecnología de IA Física y los robots humanoides.
Hoy voy a aprovechar dos noticias de máxima actualidad para representarlo.
La media maratón de robots humanoides de Pekín.
La nueva mano de Optimus.

El 19 de abril de 2026 más de 100 robots humanoides de fabricación china corrieron junto a 12000 corredores humanos en un recorrido de 21 kilómetros en el distrito E-Town de Pekín. Lo que ocurrió a lo largo de esos 21 kilómetros puede calificarse al mismo tiempo como asombroso, caótico e incluso hilarante, pero sobre todo hay que reconocer que es otro de esos hitos que nos están mostrando el futuro de la robótica.
Lightning es el nombre del robot ganador de la carrera, su fabricante es Honor y ha completado el recorrido en 50 minutos y 26 segundos, pulverizando el récord mundial de media maratón de 57 minutos, establecido por el ugandés Jacob Kiplimo, por casi siete minutos. Honor no solo ganó la carrera, sino que sus robots coparon el podio, obteniendo el primer, segundo y tercer lugar.
De la carrera destacar un par de aspectos que nos hablan de lo rápido que está evolucionando y mejorando esta tecnología:
El robot ganador de la misma carrera el año pasado terminó en 2 horas y 40 minutos. Lightning de Honor completó el mismo recorrido en 50 minutos. Esto nos indica que estamos entrando en plena exponencialidad.
En la carrera de este año el 40% de los robots corrían de forma autónoma, frente a la carrera del año anterior donde el porcentaje de teleoperación fue mucho mayor. Esto es muy importante porque nos habla de cómo está mejorando el software, no sólo el hardware.
Bien, ahora que sabemos que los robots corren que vuelan y que Honor se está metiendo a tope con esto de los humanoides veamos lo de la nueva mano que ha diseñado Tesla para Optimus.
Lo que Tesla nos está contando con esta nueva patente es que la cosa con Optimus va muy en serio. Sí, suena raro, pero es que viendo las demos del resto de empresas podría parecer que nos basta con un robot que hace las cosas y punto. Por ejemplo en la mayoría de demos de empresas de IA Física lo que vemos son brazos robóticos con pinzas, que pueden manipular todo tipo de objetos, incluso parece que de forma bastante precisa. Pero en Tesla andan pensando en otra cosa.
El nivel de excelencia que está buscando Tesla con su robot es otra historia. Si has probado sus coches sabrás de qué te hablo. Y de conseguir algo similar, estaremos ante una tecnología que no dejará a nadie indiferente.
De lo que hablo es de reinventar el concepto de robot. Se trata de comparar lo que están haciendo el resto de fabricantes, que buscan ofrecer lo básico para resolver las actividades cotidianas que se puedan encomendar al robot, frente a algo totalmente distinto que busca ir más allá de la utilidad inmediata y superar incluso las capacidades humanas.
Por verlo como un símil, la mano de cualquier robot sería como la mía, bastante torpe para la mayoría de los trabajos manuales, sin embargo la mano de Optimus aspira a tener la destreza equivalente a la de un cirujano.
Creo que esto justifica los retrasos en la fabricación del robot de Tesla, no me gusta que sea así porque me gustaría poder comprar el robot ya mismo, pero la diferencia en cuanto a la calidad final del producto hará que valga la pena la espera.
¿Logrará Tesla un hito para la manipulación similar al alcanzado por Honor para la locomoción?
Tener robots rápidos, flexibles y fuertes está bien, pero sobre todo queremos tener robots hábiles y eso es lo que nos transmite la nueva patente de la mano de Tesla Optimus.
Una patente que describe una arquitectura mecánica bastante distinta a la que se suele ver en la mayoría de robots actuales, que suelen ser relativamente simples. Básicamente una pinza o un sistema con pocos grados de libertad que permite agarrar objetos grandes pero que tiene bastantes limitaciones cuando se trata de manipular cosas pequeñas o delicadas.
Por lo tanto, Tesla está intentando resolver ese problema con un diseño más cercano a la anatomía humana.
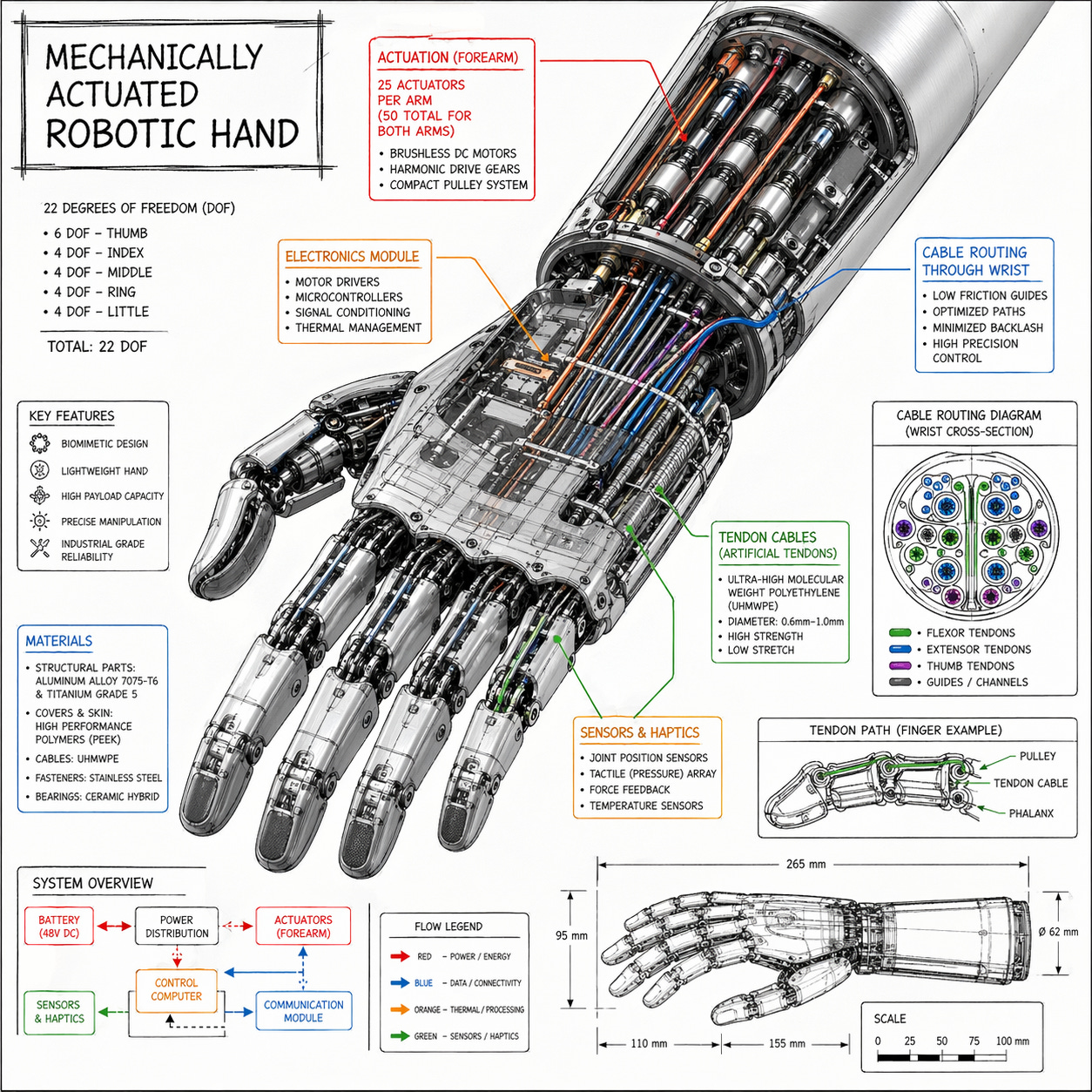
La idea central de la patente es elegante desde el punto de vista de ingeniería: los motores que generan el movimiento no están dentro de la mano, sino en el antebrazo. Desde ahí el movimiento se transmite a los dedos mediante cables que funcionan de forma similar a los tendones del brazo humano.
Este detalle tiene varias consecuencias importantes.
Ligereza: en robótica existe un principio que muestra cuanto más peso colocas en el extremo de una articulación, más difícil es controlar el movimiento con precisión. Al desplazar los actuadores al antebrazo se reduce la masa en la mano y se mejora el control fino.
Densidad mecánica: una mano humana tiene muchos grados de libertad y replicar esa complejidad dentro de un volumen pequeño es extremadamente difícil. El uso de cables permite introducir múltiples articulaciones en los dedos sin tener que meter motores en cada falange.
Precisión: los cables recorren el interior de la palma y la muñeca a través de canales y poleas diseñadas para reducir la fricción y mantener la tensión adecuada. Esto permite controlar con más delicadeza la fuerza aplicada por cada dedo.
Entonces, si nos fijamos con detalle en el diseño que muestra la patente, el objetivo parece claro. No se trata solo de agarrar objetos, sino de manipularlos con destreza casi humana. Y esto aporta un valor incalculable porque amplía las posibilidades de dónde y cómo puede trabajar Optimus en todo tipo de situaciones y lugares (La Luna y Marte incluidos)
Más noticias sobre IA Física y robótica
🦓 Skild AI compra Zebra Technologies con el objetivo de implementar su sistema de inteligencia artificial integral en almacenes. Esto permitirá un aumento considerable de la productividad y añadirá un nuevo elemento a su ciclo de datos para entrenamiento de robots.
💻 Antioch quiere ser “el Cursor” de la IA Física. La startup desarrolla herramientas de simulación para desarrolladores de robots, cerrando la brecha entre la simulación y la realidad, logrando que los entornos virtuales sean tan realistas como para que los robots entrenados en ellos puedan operar de manera confiable en el mundo físico.
🤝 Neura Robotics y AWS llegan a un acuerdo estratégico para acelerar la IA Física a gran escala, combinando la plataforma de robótica cognitiva de NEURA con la infraestructura en la nube y de IA de AWS para ayudar a entrenar, validar e implementar la próxima generación de robots inteligentes.
🧬 Anyscale presenta Multiply Labs donde se usa la IA y la robótica para impulsar la biofabricación de alto rendimiento y libre de contaminación. Mediante el entrenamiento de modelos de IA física más grandes y complejos en la plataforma multi-nube de, Multiply Labs permite que los robots trabajen en la industria de productos biológicos para medicamentos.
📹 Mimic-video es un novedoso modelo de acción-vídeo (VAM) que combina un modelo de vídeo preentrenado a escala de internet con un decodificador de acciones basado en la coincidencia de flujos, condicionado a sus representaciones latentes.
📷 URLab es un plugin para Unreal Engine que integra el motor de física MuJoCo directamente en el editor y el entorno de ejecución lo cual permite disponer de un simulador de robótica de código abierto y alta fidelidad que integra la renderización fotorrealista de Unreal Engine con la física de precisión de MuJoCo.
🚘 Coco está convirtiendo sus 10.000 robots de reparto en una red de sensores en tiempo real en colaboración con BlindSquare, proporcionando alertas de peligro en tiempo real a los peatones ciegos en seis ciudades de Estados Unidos y Europa
⚛️ Physical Intelligence presenta su nuevo modelo de IA Física π0.7 que por primera vez muestra indicios tempranos de que un único sistema generalista puede improvisar, combinando habilidades aprendidas y entrenamiento a escala web para manejar tareas del mundo real para las que nunca se le enseñó explícitamente.