
GEN-0 el modelo razonador de IA para robots
Igual que los modelos razonadores mejoran mucho la calidad de los resultados de la GenAI también podrán hacerlo en los robots.

La promesa de los robots humanoides está más cerca que nunca, pero aún quedan muchos retos por resolver, por ejemplo en materia de desarrollo de la IA. Por suerte cada día se producen noticias que nos muestran que todos los esfuerzos que se realizan a nivel de investigación y desarrollo van dando sus frutos.
A este respecto hoy me gustaría detenerme en el trabajo que realiza la empresa Generalist que acaba de presentar su modelo de Inteligencia Artificial enfocado en la interacción física, al que han llamado GEN-0 y que ha mostrado importantes avances a la hora de escalar el entrenamiento de robots.
Sus desarrolladores nos muestran un nuevo modelo de IA con unas características que se asemejan mucho a las de los humanos en materia de percepción e interacción, de hecho usan terminología que llama mucho la atención, como por ejemplo:
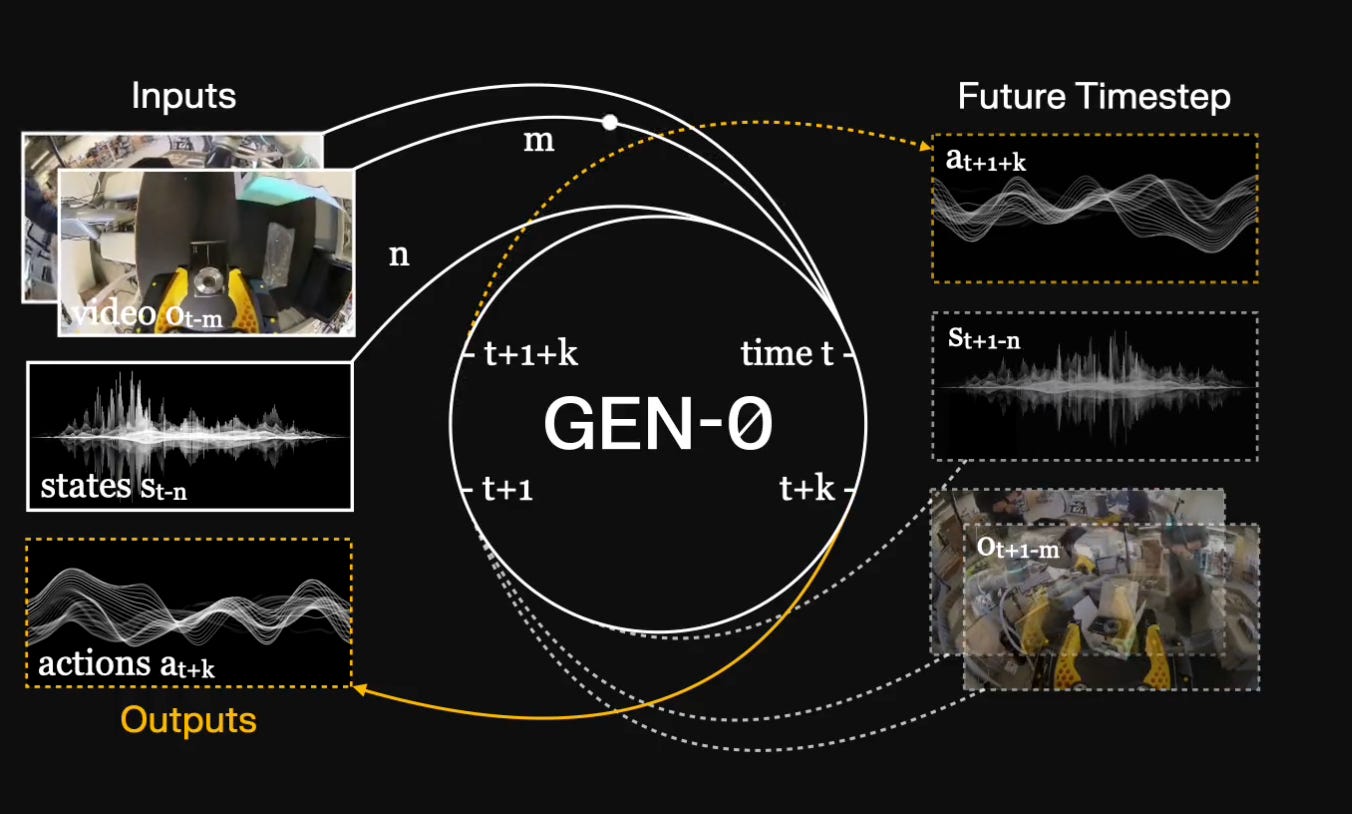
La arquitectura de GEN-0 se basa en las fortalezas de los modelos de visión y lenguaje, a la vez que las supera, al estar diseñada de forma nativa para capturar reflejos y sentido común físico a nivel humano. Una característica fundamental es el Razonamiento Armónico, en el que los modelos se entrenan para pensar y actuar simultáneamente de forma fluida.
Reflejos, sentido común, razonamiento armónico, … todo esto me lleva a pensar que el trabajo que se está realizando en robótica cada vez está más cerca de parecerse a lo sucedido con la Inteligencia Artificial Generativa, donde a medida que han ido desarrollándose nuevos modelos estos han ido mostrando unas mayores capacidades de inteligencia.
De esta forma, lo que ha ocurrido con la GenAI, parece estar sucediendo también con el entrenamiento de robots, a medida que aumenta la escala de los datos y la computación, también lo hacen las capacidades del robot por aprender a realizar tareas nuevas.
Así lo cuenta la propia empresa:
Al entrenar los robots con una cantidad enorme de datos, vimos que se produce un punto de inflexión: cuando se alcanzan unos 7.000 millones de ejemplos, los modelos más pequeños dejan de mejorar, pero los más grandes siguen aprendiendo y volviéndose más hábiles. Después de ampliar GEN-0 hasta más de 10.000 millones de datos, comprobamos que estos modelos grandes aprenden nuevas tareas con mucha facilidad y necesitan muy poco entrenamiento adicional. Por lo tanto, los modelos GEN-0 exhiben fuertes leyes de escala, en las que más datos de preentrenamiento y capacidad de cómputo mejoran de manera consistente (y predecible) el rendimiento posterior al entrenamiento del modelo en muchas tareas.
Pero el avance logrado con este nuevo modelo de robótica no queda aquí, sino que la empresa ha sido capaz de superar uno de los problemas más importantes a la hora de pasar de la GenAI a la IA Física, el razonamiento:
Es lo que han llamado el razonamiento armónico, que evita que el robot se tenga que tomar un tiempo antes de actuar, como hacen los chatbots cuando usamos los modelos razonadores:
El razonamiento armónico propone un enfoque nuevo de entrenamiento de modelos, creando una interacción “armónica” entre los flujos asíncronos y continuos de percepción y acción. Esto permite escalar a modelos de gran tamaño sin depender de las arquitecturas de Sistema 1 - Sistema 2, ni de la guía externa durante el proceso de inferencia.
Sin duda este desarrollo de Generalist es un avance muy importante que puede ayudar mucho a impulsar esta tecnología de los robots humanoides, pero en este punto me surge una duda. ¿Cómo se traslada esta tecnología al resto del ecosistema? porque lo que estamos viendo es un sinfín de iniciativas para mejorar las capacidades de los robots tanto a nivel de software como de hardware, sin embargo lo que falta por ver es cómo se van trasladando de un lado a otro hasta lograr robots totalmente funcionales.
🔓 ¿Qué hay del Open Source?
Me explico, si hablamos por ejemplo de un modelo de trabajo abierto, como el que propone el Open Source Physical AI Manifesto, cada empresa haría sus propios desarrollos y otras podrían usarlos para mejorar sus productos, luego cada una vendería su producto y se entonces se produciría una competencia por captar el mayor número de clientes, Pero en el caso de trabajos como el de Generalist, no parece aún vender nada. Sin embargo no creo que sus inversores, entre los que se encuentran Spark Capital, NVIDIA, Boldstart Ventures, Bezos Expeditions y NFDG, vayan a dejarles mucho tiempo sin dar resultados económicos.
Entonces es cuando tendremos que empezar a ver que alguno de los fabricantes de robots más avanzados comienzan a contratar los modelos de IA de empresas como Generalist o incluso adquirir la empresa completa. Porque lo que vemos en la mayoría de los casos es que los que fabrican el cuerpo del robot también trabajan intensamente por desarrollar el software de Inteligencia Artificial. Sin embargo, mi intuición me dice que no tardarán en producirse muchas más interacciones entre las empresas, porque el mercado no quiere esperar a que cada uno sea capaz de hacerlo todo bien por sí mismo.
No tenemos que irnos muy lejos para comprobar cómo se produce este intercambio. Por ejemplo en la GenAI hemos visto surgir empresas como Perplexity y Lovable, que logran un notable éxito basándose en modelos creados por otras empresas como OpenAI y Anthropic, añadiendo una interfaz de usuario especializada para funciones concretas, Perplexity para el buscador y Lovable para el creador de apps. Luego incluso, grandes empresas con recursos casi ilimitados, como Apple, tienen que recurrir a OpenAI y Google para dotar de inteligencia real a sus aplicaciones.
En definitiva, creo que Generalist, Skild, OpenMind y Build van a convertirse en una pieza fundamental para hacer realidad el sueño de los robots humanoides, así que habrá que estar también muy atentos a ellas, igual que lo estamos a los fabricantes de robots: Unitree, Figure, 1X, Agility, Apptronik, …
🔬 Nuevos avances en el entrenamiento del robot G1 de Unitree
Si tuviera que destacar grandes tendencias en el desarrollo de la robótica de propósito general, además de lo que acabamos de ver del software y los avances de los principales fabricantes de robots, tendría que decir que una de las más importantes es lo que he denominado como el robot G1 de Unitree usado como laboratorio callejero. Es decir, cantidad de empresas y otro tipo de organizaciones, que no están creando su propio robot sino que lo que buscan es ofrecer software que funcione sobre el robot humanoide más accesible en el mercado.
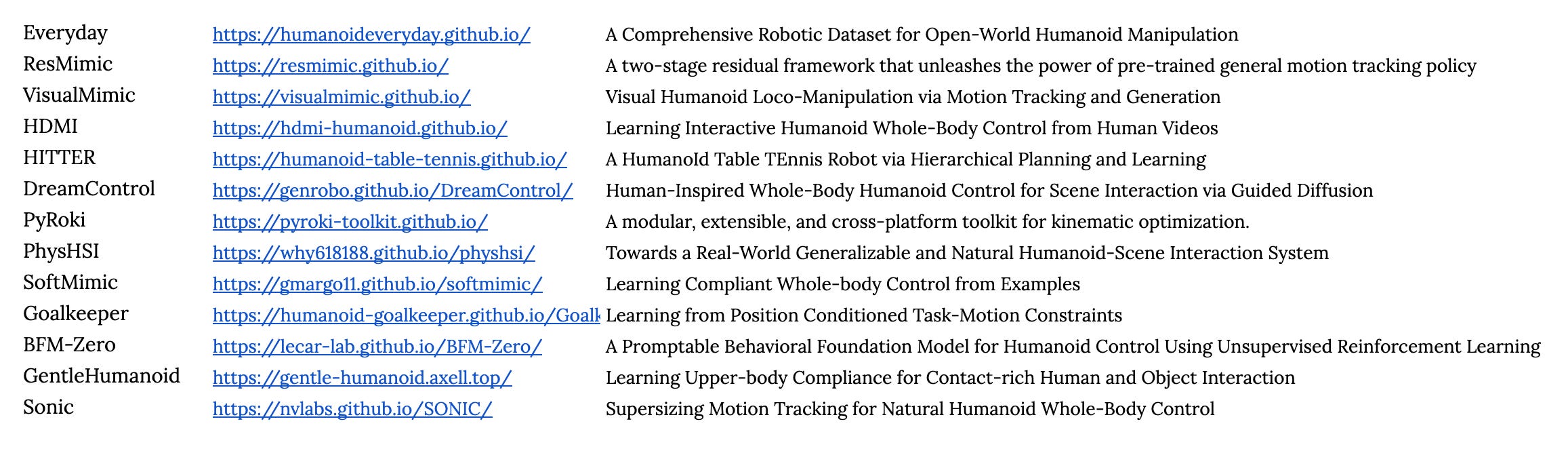
Por ejemplo de las que he conocido esta semana vale la pena mencionar GentleHumanoid que enseña a los robots humanoides a moverse con suavidad y seguridad, adaptando la fuerza y el contacto con personas y objetos. Funciona con control corporal completo, ajusta la fuerza de cada articulación mostrando movimientos naturales y seguros. Lo cual resulta de gran utilidad por ejemplo cuando se trata de ayudar a personas con problemas de movilidad.
También BFM-Zero, desarrollado por META, que es un modelo que permite a un robot humanoide aprender y ejecutar muchas tareas distintas con una sola red, sin volver a entrenar. Combina movimientos, metas y recompensas en un mismo espacio de representación, logrando que el Unitree G1 actúe en el mundo real con habilidades completas de cuerpo entero. Usa aprendizaje no supervisado y modelos Forward-Backward, más estables que el refuerzo clásico, y técnicas que reducen la distancia entre simulación y realidad.
Y qué decir de SONIC, el trabajo realizado por NVIDIA como sistema de control que da a los humanoides movimiento general y natural. Combina seguimiento masivo de movimiento humano, control por realidad virtual y conexión con modelos de visión-lenguaje-acción para que puedan moverse y ejecutar tareas de forma autónoma.
Así que ya ves, hoy tocaba hablar de software, la pieza imprescindible para dotar a los robots de las habilidades que esperamos de ellos.
Nota: sigo recopilando aquí todos trabajos de investigación para dotar al robot G1 de Unitree de utilidad real. Ya son 13 y crecen por momentos.
Más noticias sobre robótica e inteligencia artificial
⚛️ Capgemini se adelanta entre las consultoras tecnológicas que buscan dar aplicaciones reales a los robots humanoides en la industria. En este caso en colaboración con Orano, que se dedica a la recuperación y transformación de materiales nucleares.
📱 Samsung ha confirmado oficialmente que está desarrollando su propio robot humanoide, con el objetivo de ser tanto proveedor de esta tecnología como cliente, implementando estas máquinas en sus propias fábricas.
🖇️ SAP se asocia con la startup Humanoid para explorarar la integración de robots humanoides cognitivos en entornos industriales y empresariales que combinarán la plataforma HMND 01 de Humanoid con las soluciones de software empresarial de SAP.
🚘 Rivian ha puesto en marcha una nueva empresa llamada Mind Robotics con la que busca adentrarse en la inteligencia artificial física y los robots industriales para lo cual ha aportado un capital inicial de 110 millones de dólares.
🦾 Tesla nos habla de las novedades de Optimus en materia de fabricación y espera escalar sus operaciones en la fábrica de Fremont durante 2026 con el objetivo de lograr un coste de fabricación de 20.000 dólares por robot.
💃 XPENG se ha pasado el juego en materia de movimiento natural para su robot humanoide Iron, hasta el punto de que ha tenido que “desnudar” a su robot Iron con forma femenina para demostrar que no era una persona disfrada de robot.
📷 Egocentrik 10K es la mayor base de datos de vídeos de trabajadores reales trabajando en fábricas, con 10.000 horas de grabación “egocéntrica” por parte de 2.153 trabajadores de fábrica y 1.080.000.000 de fotogramas.

En dos semanas tendremos el primer curso online en directo de Robots Humanoides, será los días 25, 26 y 27 de octubre de 18 a 12h.
Te puedes apuntar al curso y a la comunidad ampliando tu suscripción a Integrarobot