
Estado del arte de la robótica humanoide en 2025
Un artículo para ponernos al día de cómo de desarrollada está la tecnología que va a hacer posible que los robots humanoides lleguen pronto al mercado.

En un artículo sobre el estado del arte de la robótica humanoide podríamos comenzar hablando de los autómatas inventados en el siglo XVI por Juanelo Turriano y Leonardo Davinci, o en el siglo XVIII por Wolfgang von Kempelen y Pierre Jaquet-Droz, que habrían sido los precursores de los robots humanoides.
Pero creo que lo más adecuado es cederle este privilegio a Shakey, el robot móvil de propósito general desarrollado entre 1966 y 1972 por el Centro de Inteligencia Artificial del Stanford Research Institute, con el objetivo de realizar tareas que requerían planificación, búsqueda de rutas y reorganización de objetos simples.
🧠 Shakey era capaz de razonar sobre sus propias acciones gracias al uso de la Inteligencia Artificial de entonces. Mientras que otros robots de la época tenían que ser programados para cada paso necesario en la tarea a realizar, Shakey podía analizar la orden y desglosarla en partes básicas. ¿Te suena esto a los razonadores de los LLMs?
🎥 La combinación de visión artificial y procesamiento del lenguaje, dentro de un robot, además del uso de técnicas como algoritmo de búsqueda A*, la transformación de Hough y el método gráfico de visibilidad, ponen a Shakey en el epicentro del desarrollo de la robótica humanoide.
🕰️ Han pasado 60 años desde entonces y tenemos mucho que agradecer a los pioneros que dieron los primeros pasos en el desarrollo de esta tecnología.
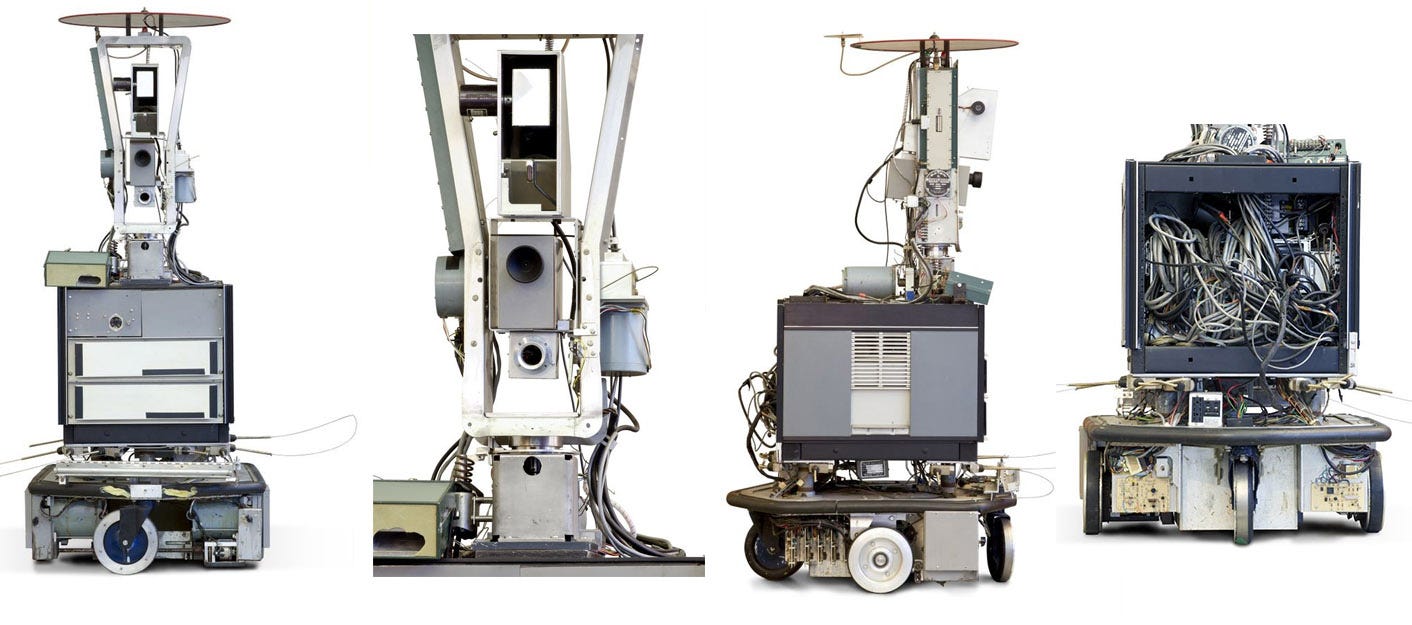
✍️ Fíjate por un momento en esta imagen, si la comparas por con los robots humanoides que se están desarrollando actualmente por parte de empresas muy punteras, te darás cuenta de que la mayor diferencia reside en el diseño, igual que si pensamos en cómo eran antes los coches y cómo son ahora, la estética es de las cosas que más llaman la atención. Pero al final lo que todo robot necesita para funcionar es hardware y software con un toque de diseño. ¿Cómo de importante es este último elemento? mucho más de lo que parece, al menos si no pensamos únicamente en el aspecto estético sino también en la usabilidad y la experiencia de usuario. Exactamente lo mismo que ha ocurrido con otras máquinas electrónicas como los ordenadores y los teléfonos, la misma evolución la estamos viviendo ahora con los robots. Quién sabe si quizás en unos años nos referiremos al momento iPhone de la robótica el día que se presentó la primera versión funcional del Tesla Optimus.
Recuerda: diseño, hardware y software.
Del diseño ya sabemos que es lo que puede marcar la diferencia en el desarrollo de robots humanoides, pero antes de que lleguemos a ese punto hay mucho aún por hacer a nivel de hardware y software.
Empecemos por el hardware 🦾
Para que un robot nos ofrezca la utilidad que buscamos, en lo que a hardware se refiere, vamos a necesitar sensores, actuadores, unidad de alimentación y unidad de control.
1️⃣ Necesitamos sensores para que los robots perciban su entorno y respondan de manera efectiva a todo tipo de estímulos. Actualmente los avances más notables se están produciendo en las siguientes áreas:
Visión artificial: cámaras RGB-D (como las de Intel RealSense) permiten captar imágenes en 3D para mapeo, navegación y reconocimiento de objetos.
Sensores táctiles y de presión: cada vez son más sofisticados, como los que ofrecen sensibilidad para manipular objetos delicados y para imitar la sensibilidad del tacto humano.
Sensores de fuerza y torque: necesarios para la estabilidad y el equilibrio, utilizados especialmente en los pies y las manos para ajustar movimientos en tiempo real.
LiDAR para navegación y detección precisa de distancias.
Micrófonos y sensores de audio para reconocimiento y respuesta verbal.
Sensores de temperatura, movimiento, proximidad, calidad del aire, …
Para tener robots humanoides totalmente funcionales los desafíos actuales que están afrontando los principales fabricantes pasan por la miniaturización sin perder precisión, la reducción de costes, especialmente en sensores avanzados como LiDAR y la integración de múltiples sensores en un sistema que gestione la información en tiempo real. Por suerte ya hay empresas como Robosense que están haciendo un gran esfuerzo para afrontar estos desafíos.
2️⃣ Necesitamos actuadores que harán las veces de los “músculos” de los robots humanoides, siendo los responsables del movimiento y la interacción física con el entorno. Para ello en la actualidad se está trabajando principalmente a través de tres vías:
Actuadores eléctricos: que son precisos y eficientes, pero tienen limitaciones en fuerza y velocidad.
Actuadores hidráulicos y neumáticos: que proporcionan mayor potencia pero suelen ser voluminosos y ruidosos.
Actuadores suaves y tecnologías emergentes: como el uso de polímeros electroactivos y las aleaciones con memoria de forma, que imitan la flexibilidad y respuesta del tejido muscular humano.
En materia de actuadores los desafíos más importantes que enfrenta la industria pasan por reducir el peso sin comprometer su rendimiento, conseguir movimientos suaves y precisos que sean energéticamente eficientes y resolver la complejidad de los actuadores en los dedos para tareas de alta precisión.
🖇️ Nota: en este punto vale la pena hacer referencia a la empresa Clone Robotics que ha desarrollado la tecnología Myofiber que son fibras musculares artificiales diseñadas para replicar las propiedades de los músculos reales, ofreciendo contracciones rápidas, gran fuerza en relación a su tamaño y eficiencia energética. Cada fibra puede generar una fuerza de hasta 1 kg por solo 3 gramos de peso, y su tiempo de respuesta es de menos de 50 milisegundos. Funcionan gracias a un sistema combinado hidráulico y eléctrico, estando dispuestas en sistemas musculares completos que eliminan la necesidad de tendones mecánicos, logrando movimientos más naturales y precisos. Esta tecnología permite que los robots humanoides sean más ágiles y versátiles, allanando el camino para aplicaciones en entornos cotidianos y laborales.
3️⃣ Necesitamos unidades de alimentación más eficientes, ya que la energía ha sido un cuello de botella importante en el desarrollo de robots humanoides hasta el momento, pero por suerte todos los avances en esta tecnología realizados para los vehículos eléctricos aportarán importantes mejoras también en la robótica.
Baterías de ion de litio: dominan el mercado, pero su densidad energética sigue siendo insuficiente para robots que operan durante largos periodos.
Almacenamiento avanzado: impulsado por las investigaciones en baterías de estado sólido que prometen más capacidad y mayor seguridad; o los capacitores para ráfagas de alta potencia, usados en movimientos intensos.
Alternativas: como los sistemas híbridos que combinan baterías con pequeños generadores y la tecnología de carga inalámbrica.
En este tema de las baterías es donde se observa con mayor nitidez la importancia de invertir en innovación y cómo los esfuerzos en el corto plazo acaban reportando beneficios significativos en el largo plazo, por eso, aunque aún existen desafíos de cara a aumentar la duración de las baterías sin añadir peso significativo y mejorar la gestión de la energía para maximizar la eficiencia del robot, queda claro que estamos en el camino correcto de mejora.
🖇️ Nota: si te interesa el tema de las baterías de estado sólido, aunque aún queda mucho por hacer para que sean una realidad comercial, ya existen algunas empresas, como Solid Power y Quantum Scape, que en su momento fueron startups, y que han realizado avances significativos en la materia, hasta el punto de que cotizan en bolsa y cuenta con importante socios industriales como Ford, BMW y Volskswagen.
4️⃣ Necesitamos unidades de control que hagan las veces del “cerebro” del hardware del robot y le ofrezcan la capacidad de cálculo necesaria como para que puedan usar los últimos avances en Inteligencia Artificial. Para ello contamos con las siguientes tecnologías:
GPUs y TPUs: como las GPU específicas para robots en las que está trabajando NVIDIA, que proporcionan potencia suficiente para ejecutar redes neuronales y modelos complejos en tiempo real.
Microcontroladores especializados: procesadores optimizados para robótica como los de STM o los desarrollados específicamente para aplicaciones industriales
Redes neuronales integradas: algunos controladores incluyen hardware dedicado para Inteligencia Artificial, lo que permite que el robot aprenda y se adapte a las cambios en tiempo real.
A medida que se producen más avances en computación el uso de sistemas de tiempo real están mejorando la latencia y la precisión en la ejecución de movimientos en los robots, pero aún es necesario que se produzcan mejoras reduciendo el consumo energético de las unidades de control, aumentando la capacidad de cálculo en entornos compactos y mejorando la sincronización entre hardware y software para la toma de decisiones en tiempo real.
Continuemos con el software 💻
El software es el cerebro que permite que el hardware de los robots humanoides tengan la capacidad para realizar tareas complejas, tomar decisiones y adaptarse a entornos dinámicos. Del mismo modo que estamos viviendo una carrera por desarrollar el robot humanoide más funcional en materia de hardware, en lo que a software se refiere vemos que más en la sombra también se están llevando a cabo iniciativas muy interesantes que vale la pena conocer:
🏁 ROS (Robot Operating System) se ha consolidado como un estándar en la robótica gracias a su naturaleza de código abierto y su capacidad para gestionar la comunicación entre los distintos componentes de un robot. Es una herramienta clave para desarrollar aplicaciones modulares que integran sensores, actuadores y algoritmos de control, facilitando: la simulación y prueba de sistemas robóticos en entornos virtuales; la creación de robots escalables y personalizables; y facilitando el acceso a una comunidad global que acelera el desarrollo de nuevas funcionalidades.
🏁 LeRobot ha sido desarrollado por Hugging Face con el objetivo de proporcionar modelos fundacionales, conjuntos de datos y herramientas para la robótica del mundo real basados en PyTorch. Gracias a esto se podrá reducir la barrera de entrada a la robótica para que los desarrolladores de robots puedan contribuir y beneficiarse del intercambio de conjuntos de datos y modelos previamente entrenados.
🏁 Genesis es es una plataforma integral de simulación física diseñada para aplicaciones de robótica , inteligencia artificial incorporada e inteligencia artificial física de uso general . Para ello ofrece un motor de física universal, capaz de simular una amplia gama de materiales y fenómenos físicos, una plataforma de simulación robótica ligera, ultrarrápida y fácil de usar; un sistema de renderizado fotorrealista potente y rápido; y un motor de datos generativo que transforma la descripción en lenguaje natural solicitada por el usuario en diversas modalidades de datos.
🏁 GRID desarrollado por Scaled Foundation, ofrece modelos fundacionales que abordan tareas robóticas como la percepción, el control, la planificación y la seguridad; permiten generar y capturar datos de percepción y acción para el entrenamiento de robots; y también la generación de simulaciones de alta fidelidad en entornos sintéticos y geo específicos con diversos modelos de sensores.
Como ves, el mundo del software para robots tiene puesto el foco en la Inteligencia Artificial, especialmente en los modelos fundacionales del mundo, de ahí la importancia de que NVIDIA también esté trabajando intensamente en este ámbito, como comentamos recientemente por aquí.
Y a continuación veamos el caso de una startup española que representa muy bien la búsqueda de equilibrio entre el hardware y el software para el desarrollo de robots que ofrezcan una utilidad real.
🇪🇸 El ejemplo de la startup española Theker Robotics

Theker es una startup especializada, por el momento, en el ámbito de la robótica industrial y que es un buen ejemplo de la importancia de la combinación entre los componentes de hardware y software, ya que usan brazos robóticos comerciales, que han mejorado a través del desarrollo de su propio software que les permite desarrollar su modelo de negocio a través de la modalidad Robot As A Service.
Además los fundadores de la empresa han participado en una investigación con la que quieren lograr que los robots ejecuten tareas complejas en entornos dinámicos. Los LLM han demostrado ser herramientas útiles para traducir comandos en lenguaje natural en planes de acción. Con esta base, han desarrollado InCoRo, un sistema que combina un controlador LLM, una unidad de comprensión de escenas y un robot, funcionando en un bucle de retroalimentación continuo. Esto permite a los robots analizar su entorno en tiempo real, ajustar su comportamiento ante cambios y corregir errores sin necesidad de aprendizaje iterativo. Este sistema demuestra una alta capacidad de generalización, superando técnicas previas en entornos estáticos y estableciendo un nuevo estándar en entornos dinámicos, especialmente para robots SCARA y DELTA.
La investigación destaca el potencial de combinar aprendizaje en contexto y LLMs avanzados para construir sistemas autónomos más confiables, eficientes e inteligentes, preparados para adaptarse a condiciones variables.
Noticias importantes de la semana sobre robots e Inteligencia Artificial
🇨🇳 Ninguna newsletter donde se trate el tema de la Inteligencia Artificial puede dejar de mencionar el drama de Deepseek y la caida de las acciones de NVIDIA de antes de ayer. Se podría decir mucho al respecto pero me quedo con este artículo de Enrique Dans en el que ya hablaba la semana pasada de cómo esta tecnología iba a sacudir la hegemonía de los modelos fundacionales norteamericanos.
🤝 La unión hace la fuerza y en materia de desarrollo de robots humanoides va a ser muy necesario que el talento se vaya agrupando para poder ofrecer soluciones prácticas en el menor tiempo posible. Bueno, supongo que eso es lo que habrá pensado el creador de robots Christoph Kohstall al incorporarse al equipo de 1X.
🧬 ¿Recuerdas los algoritmos genéticos? Quizás te suene si has estudiado algo de Inteligencia Artificial antes de la llegada de los transformers. Pues ahora resulta que la propia Deepmind los está resucitando para mejorar el funcionamiento de sus propios modelos.
🤖 Si esta no fuera una newsletter sobre Robots Humanoides seguramente lo habría sido sobre Agentes Inteligentes, pero como no vamos a cambiar de tema a estas alturas, al menos compartir algunas noticias interesantes al respecto:
La prueba que ha realizado Carlos Santana de Operator de OpenAI. ¡Realmente espectacular! qué ganas de probarlo :)
La presentación por parte de Jack de Goose, su aportación en código abierto para mejorar el desarrollo de agentes inteligentes.
Necesitamos APIs para que funcionen los agentes, es una de las formas en la que interactúan con el mundo, y empresas como Postman quieren ponérselo fácil.
🙌 Qué suerte tener amigos como Frankie Carrero que me apoyan en todo lo que hago. Y además volviendo a ser entrevistado a su podcast, esta vez para hablar de la integración de la robótica con la Inteligencia Artificial. ¡Muchas gracias!
¿Te ha gustado esta newsletter? espero que, como yo, hayas aprendido un montón sobre el hardware y el software que hacen posible el desarrollo de los robots humanoides. Si es así, te animo a que la compartas con tus amigos.
Enhorabuena por la web, muchas gracias, resulta muy útil encontrar reunidas y editadas tantas informaciones sobre este tema.
Una sugerencia: el diseño, hace mucho que no es la parte decorada o estética de la definción de un producto, sino el conjunto de proyecto, producción, distribución y recepción, o al menos el proyecto para la producción, es un modo de "hacer mundo". Desde el Design Thinking para la empresa al diseño especulativo, hace mucho que el diseño dejó de ser una guinda. Se pierden oportunidades de hablar del robot desde la integración de todos esos aspectos en el diseño, se queda uno sin esa palabra y sus múltiples matices.
Creo que tampoco se gana mucho con un uso tan coloquial e inespecífico en un sitio como este que tiene un cariz tan sofisticado.
Pero en fin es sólo un minúsculo detalle con ánimo de ayudar a que siga adelante este sitio tan interesante. ¡Enhorabuena de nuevo!